Controls & Embedded Systems
Klipper – Sovol SV05
Full Klipper firmware installation and systematic calibration on a Sovol SV05 running on an Inovato Quadra SBC. Covers OS setup, KIAUH stack, firmware flashing, PID tuning, input shaping with ADXL345, and pressure advance optimization.
Hardware
Component Details
Host SBC Inovato Quadra — Allwinner H616 octa-core, Armbian Printer Sovol SV05 — CoreXY Ender-5 clone MCU Creality 4.2.2 32-bit (GD32F303VET6, STM32F103-style, 28 KiB bootloader) Accelerometer ADXL345 — input shaping measurement Camera Arducam USB — Crowsnest webcam integration OS Armbian-unofficial_24.5.0-trunk_Inovato-quadra_bookworm_current_6.6.22
Calibration Workflow
01
Mechanical Checks
Frame squaring, belt tension, axis motion verification
02
PID Tuning
Hotend and bed PID calibration via Klipper's built-in command
03
Extruder Calibration
E-step measurement and rotation_distance adjustment
04
Bed Mesh & Z-Offset
5×5 BLTouch mesh, probe calibration, first layer validation
05
Flow Rate
Single-wall cube measurement, extrusion multiplier adjustment
06
Temperature Tower
TUNING_TOWER from 195→220°C, 5°C steps every 5mm
07
Retraction
Distance and speed towers — optimized to 3.8mm @ 60mm/s
08
Pressure Advance
TUNING_TOWER from 0, factor 0.005/layer until corners sharpen
09
Input Shaping
ADXL345 resonance measurement on X and Y, CALIBRATE_SHAPER
10
Speed & Acceleration
Max accel capped at 2000 mm/s² — above this causes seam separation
Results
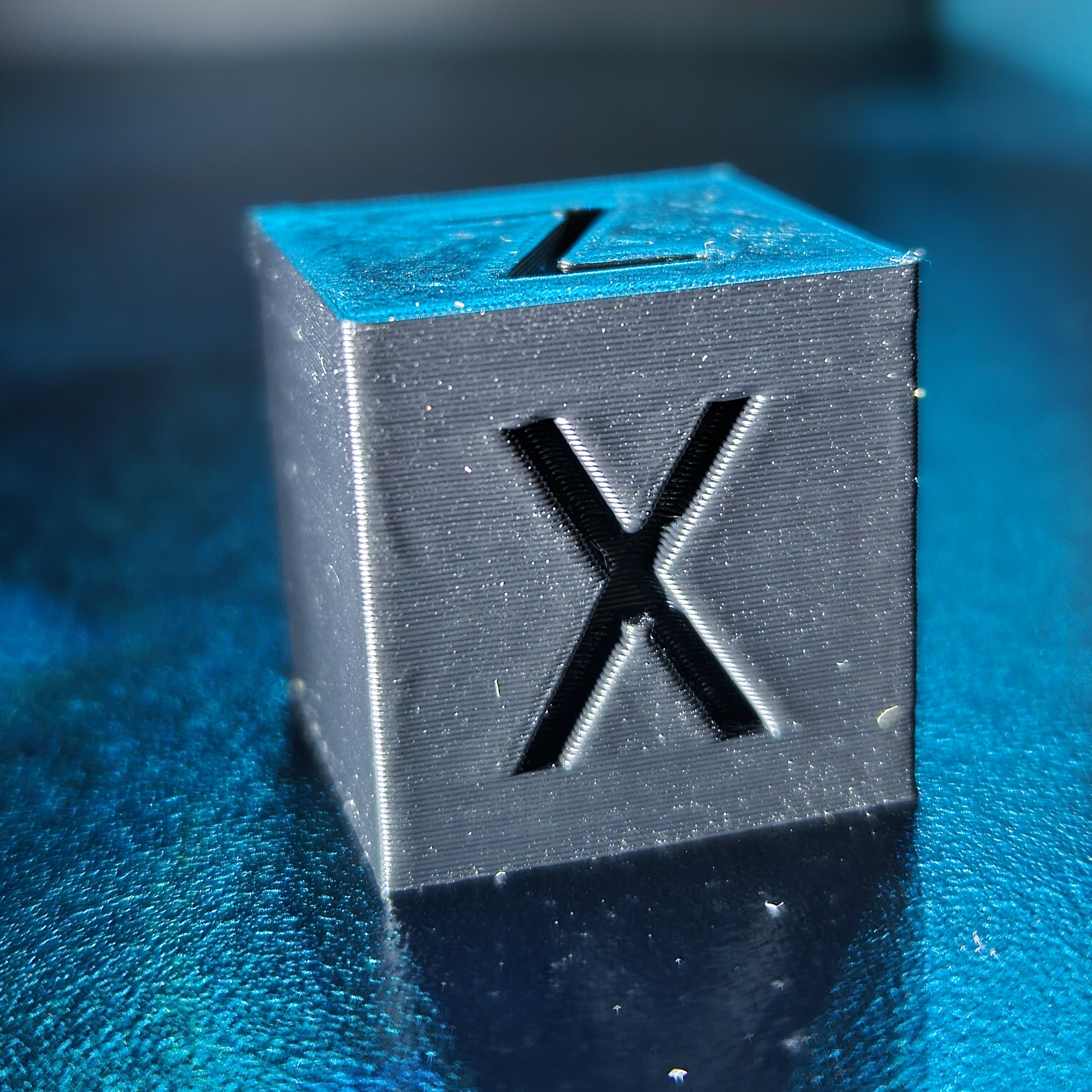
Input Shaping — X Axis | Before / After
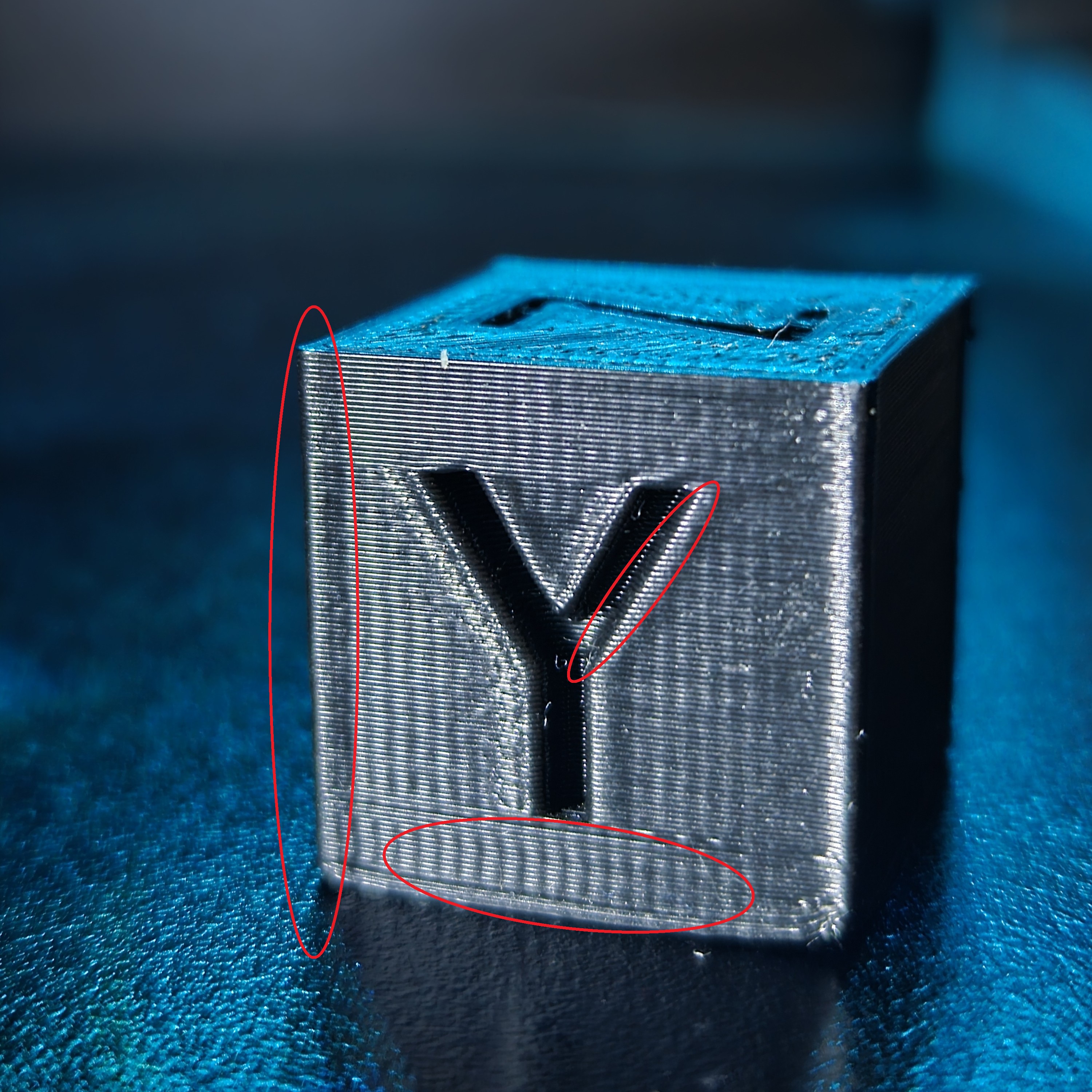
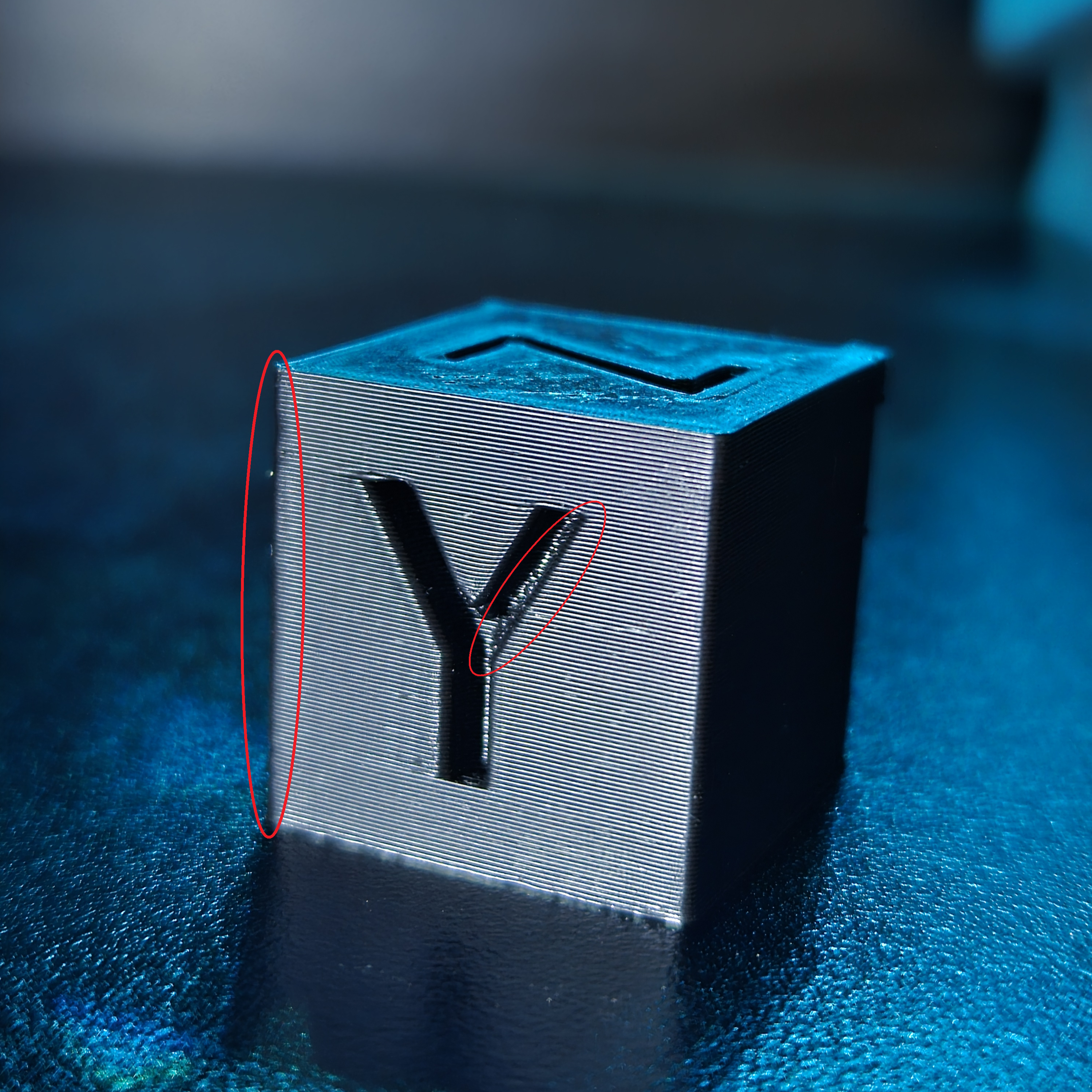
Input Shaping — Y Axis | Before / After
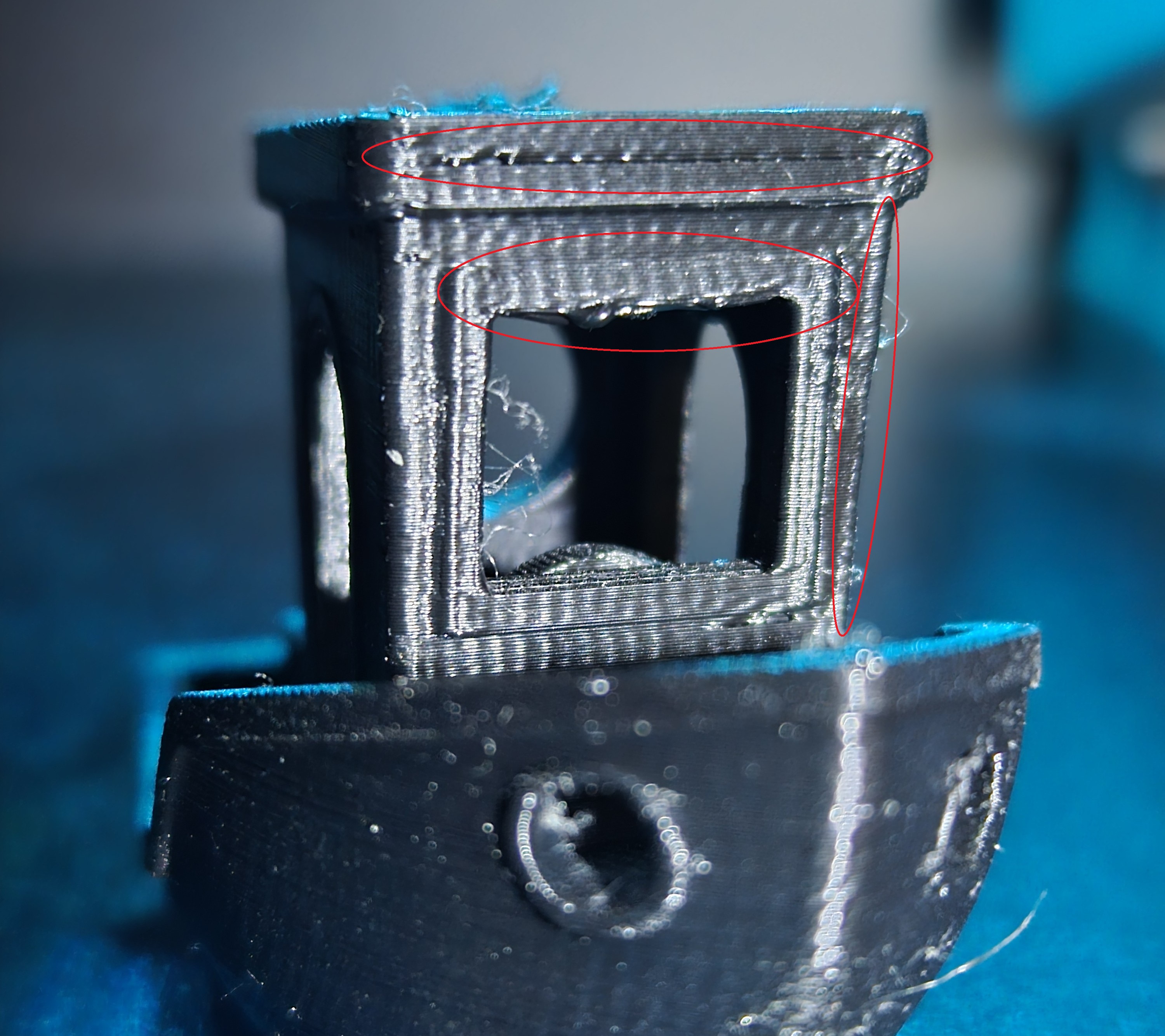
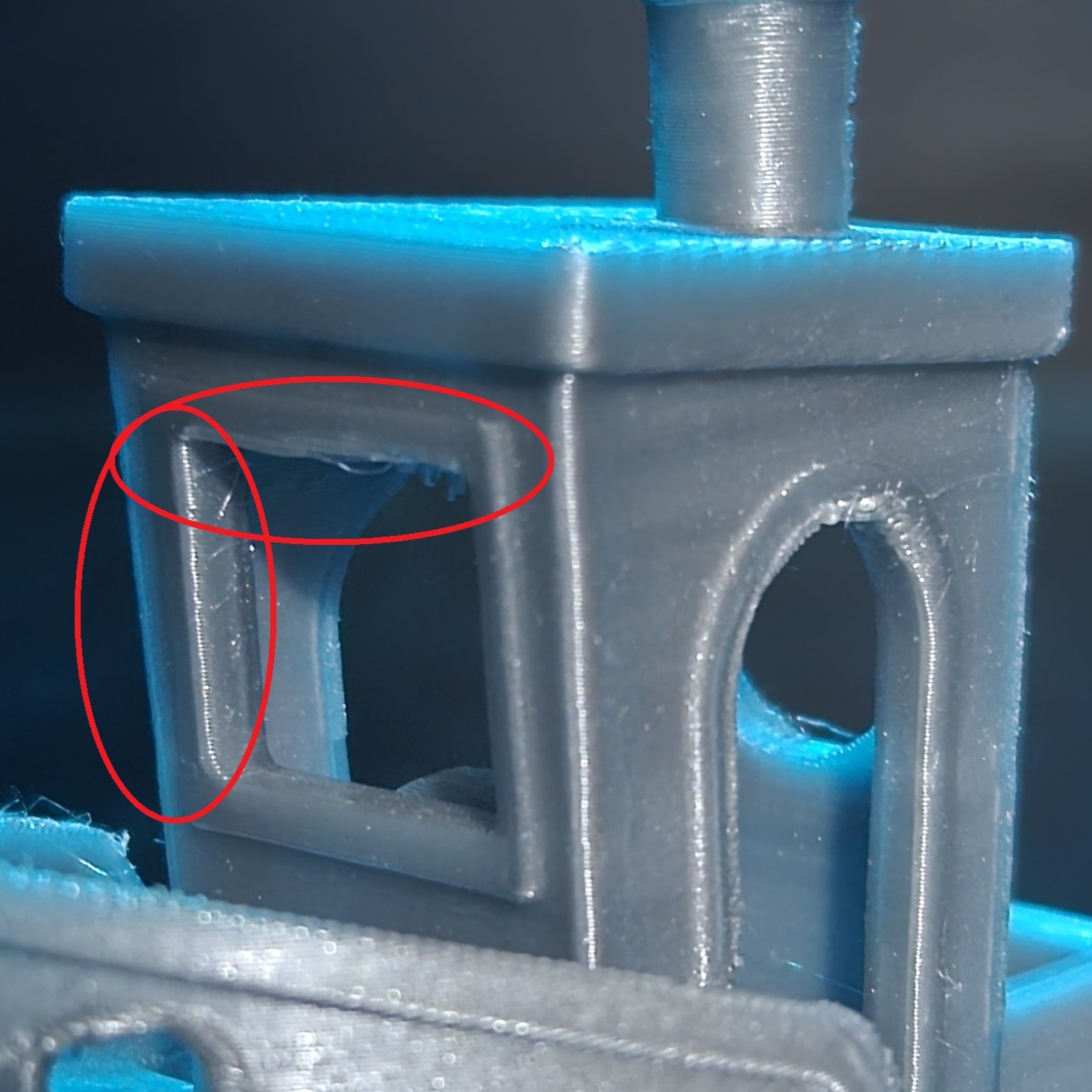
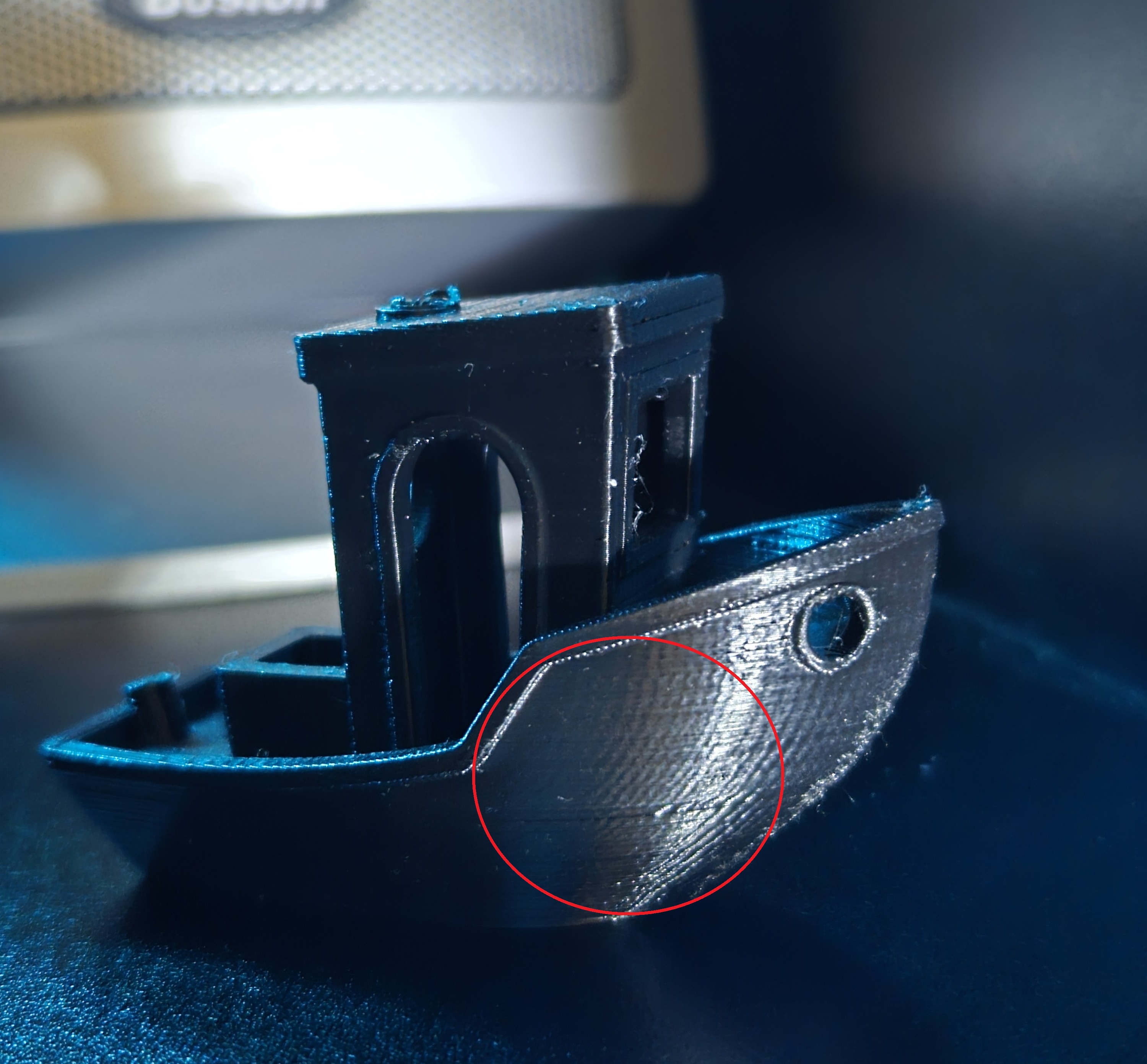
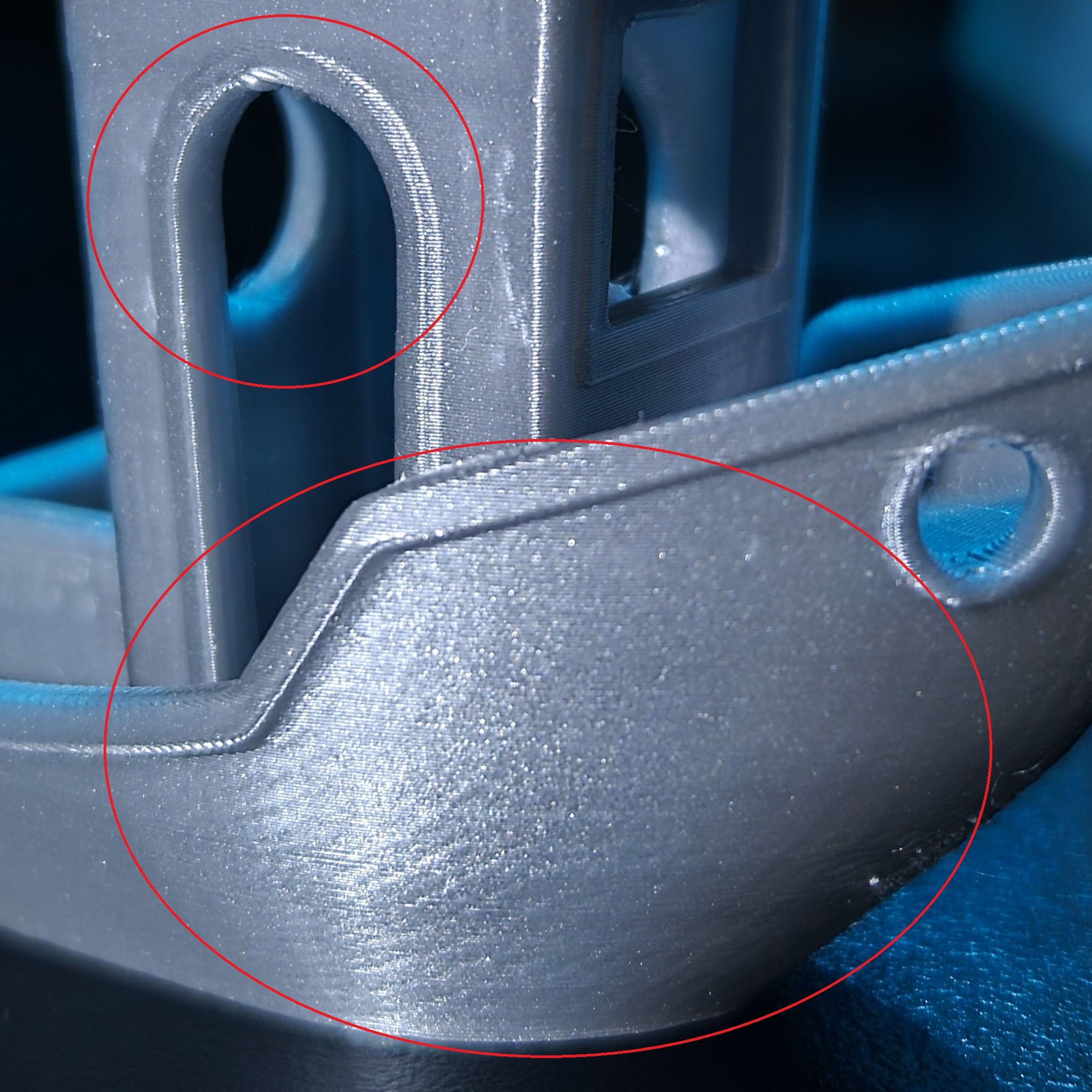
Benchy — Overhang | Before / After
Benchy — Ringing | Before / After
Click any image to view full size